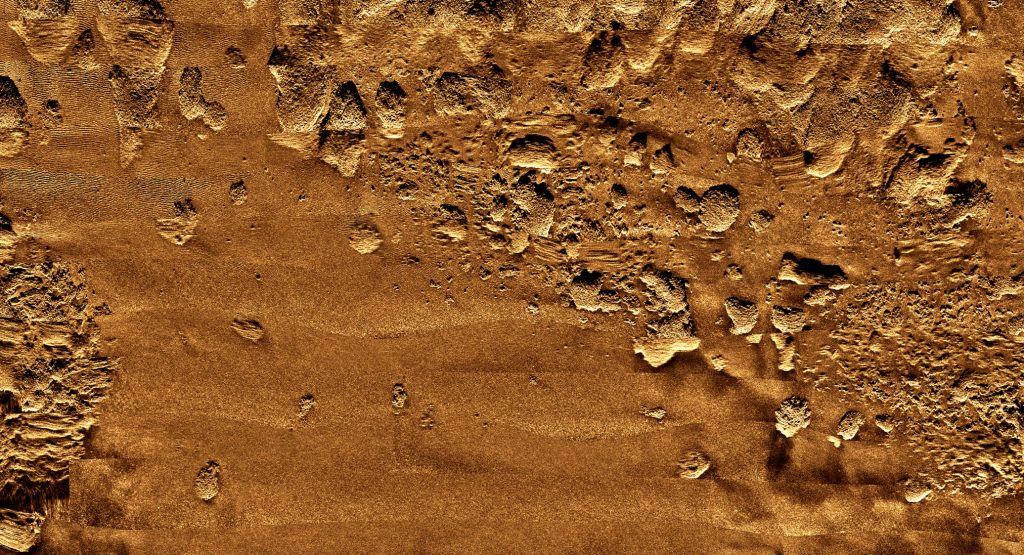
サイドスキャンソナーは、調査船に曳航された送受波器から扇状に発振された音波が海底で反射した強 度を色の濃淡として描画する技術です。反射強度は海底の性状の違いを示しており、海底面の堆積物(泥・砂・礫)の相対的な区分ができます(※1)。また、 広域の魚礁分布や消波ブロックの散乱状況などが面的に把握できます。
当社では、KLEIN社製のSYSTEM3000(132kHz/445kHz)および GeoAcoustic社製の小型サイドスキャンソナー PulSAR(550kHz~1MHz可変)を使用し、広域での海底面探査から魚礁ブロックの判読のような高精細探査までサポートします。
| サイドスキャンソナー | マルチビーム測深 | |
| 探査目的 | 海底の状況・性状把握 -表層の底質分類 -構造物の現況調査(広域) -魚礁の現況分布(広域) | 水深データの取得 -海底地形調査 -構造物の現況把握 |
| 探査幅 | 10m~400m (※2) | 水深の2倍~3倍 |
| 探査水深 | 小型船で実施する場合、水深 数メートル~70メートル ウインチとアーマードケーブルと共に調査船で実施する場合、 水深 数メートル~1500メートル程度 | 浅海用:水深 1m~300m 深海用:水深 数百メートル~数千メートル |
| 成果図面 | 海底面記録のモザイク図 海底面状況図(底質判別図) (※1) 魚礁位置図 など ⇒ 2次元の平面画像による”海底表面”イメージ | 等深線図,水深図 鳥瞰図 断面図 など ⇒ 3次元の点群や鳥瞰図による”地形”イメージ |
※2 探査幅が広がるほど解像度は劣化します。
SYSTEM3000
SYSTEM3000サイドスキャンソナーは最大450mレンジにて海底の底質分布確認(岩礁・礫・砂・泥・砂漣)が可能であり、広範囲で海藻や藻場の分布状況確認、既存魚礁の分布状況確認、海中落下物の捜索などに最適です。ワイドレンジの性能を持ちながらも、十分に小型船での調査運用が可能であるため、効率的な作業を実現します。

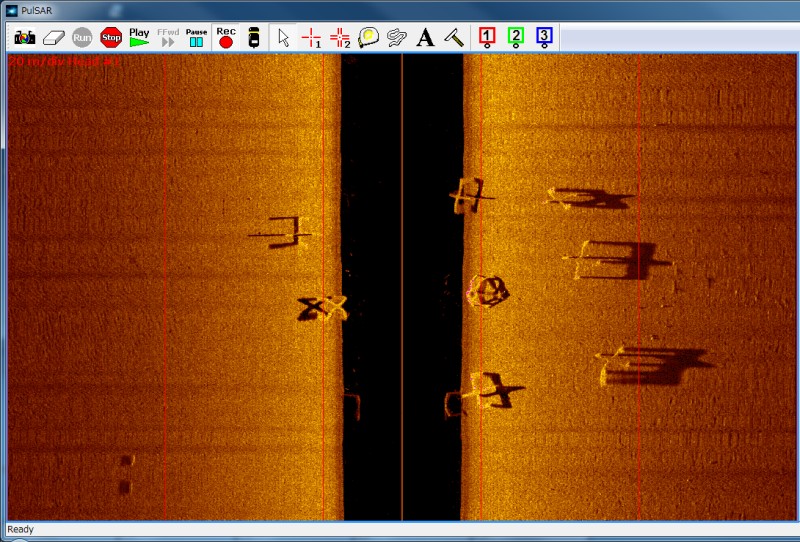
PulSAR
PulSARは英国GeoAcoustic社のサイドスキャンソナーです。「550kHz~1MHzの高周波でありながら極めてローノイズ」「曳航体は軽量小型(全長1.1m, 空中重量16.5kg)でありながら安定した姿勢」により、非常にクリアな海底面イメージを再現することが可能です。
コンパクトな曳航体と簡素なシステム構成により、船外機船などの小型船での作業も容易であり、浅い深度で曳航しても、海面反射(ノイズ成分)を低く抑えられる特徴があります。

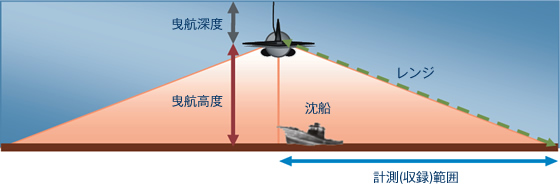
サイドスキャンソナーの計測概要
サイドスキャンソナーは調査船の船尾から海中を曳航しながら探査します(下図-上)。
「レンジ」とは、ソナーから同心円状に発振された音波の到達距離であり、「斜距離」とも言われ、実際の「計測範囲」はレンジよりもやや短くなります。
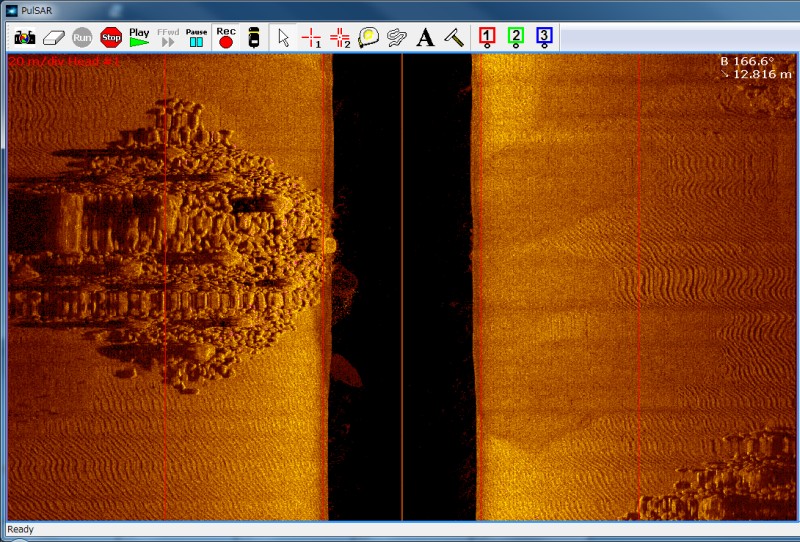
サイドスキャンソナーの記録 (下図-下)は、受信した音波の反射強度(正確には後方散乱強度)を色の濃淡で表現します。記録の横軸は音波が発振されてからの経過時間と近似し、外側ほど遅れて到達した部分です。中央部の黒く抜けた記録は「欠測」ではなく、音波が発振されてからソナー直下の海底に反射して帰ってくるまでの時間(曳航高度)です。すなわち、この記録では沈船がソナーのほぼ直下に位置すると言えます。
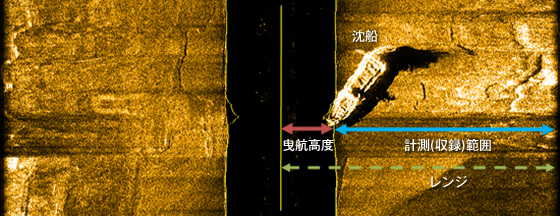
水深:約45m / 曳航深度:約5m / レンジ:200m / 周波数:500kHz